

3.11.16 镗孔(镗孔2)CYCLE86
编程:CYCLE86(RTP,RFP,SFD,DEP,RDP,DTB,SDIR,RPFA,RPSA,RPTA,POSS)
参数:
|
RTP |
Real |
退回平面(绝对坐标) |
|
RFP |
Real |
基准平面(绝对坐标) |
|
SFD |
Real |
安全间隙(无符号输入) |
|
DEP |
Real |
最后钻孔深度(绝对坐标) |
|
RDP |
Real |
相对于基准平面的最后钻孔深度(无符号输入) |
|
DTB |
Int |
最后钻孔深度处的停顿时间(断屑) |
|
SDIR |
Int |
旋转方向值:3(对应于M3)、4(对应于M4) |
|
RPFA |
Real |
平面中第一轴(X轴)上的返回路径(增量,带符号输入) |
|
RPSA |
Real |
平面中第二轴(Y轴)上的返回路径(增量,带符号输入) |
|
RPTA |
Real |
镗孔轴(Z轴)上的返回路径(增量,带符号输入) |
|
POSS |
Real |
循环中定位主轴停止的位置(以度为单位) |
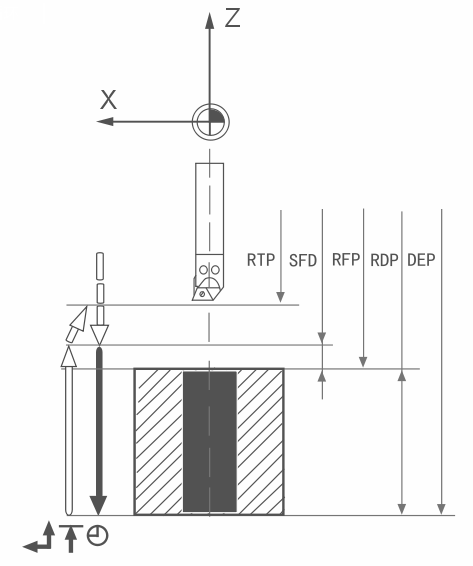
图3.57 CYCLE86图例
功能:此循环可以用来使用镗刀进行镗孔。刀具按照编程的主轴转速和进给速度进行钻孔,直至到达最后钻孔深度。使用镗孔2时,一旦到达钻孔深度,便激活了定位主轴停止功能。然后,主轴从编程的返回位置快速回到退回平面。
1.使用G0到达基准平面之前的安全间隙处。
2.使用G1按循环调用前编程的进给速度移动到最终钻孔深度处。
3.最后钻孔深度处的停顿时间。
4.定位主轴停止在POSS下编程的位置。
5.使用G0在三个轴方向上返回。
6.使用G0在镗孔轴方向返回到基准平面之前的安全间隙处。
7.使用G0返回到退回平面。
参数说明:
1.对于参数RTP、RFP、SFD、DEP、RDP,参见CYCLE81。
2.DTB(停顿时间):DTB以秒为单位编程了到达最后钻孔深度时的停顿时间。
3.SDIR(旋转方向):使用此参数定义循环中进行镗孔时的旋转方向。如果参数的值不是3或4(M03/M04),则产生报警且不执行循环。
4.RPFA(第一轴上的返回路径):使用此参数定义在第一轴上(横坐标)的返回路径,当到达最后钻孔深度并执行了定位主轴停止功能后执行此返回路径。
5.RPSA(第二轴上的返回路径):使用此参数定义在第二轴上(纵坐标)的返回路径,当到达最后钻孔深度并执行了定位主轴停止功能后执行此返回路径。
6.RPTA(镗孔轴上的返回路径):使用此参数定义在镗孔轴上的返回路径,当到达最后钻孔深度并执行了定位主轴停止功能后执行此返回路径。
7.POSS(主轴位置):使用POSS编程定位主轴停止的位置,单位为度,该功能在到达最后钻孔深度后执行。
注意
只有主轴在技术上能够进行位置控制,才可以使用CYCLE86。
编程实例:
使用CYCLE86镗孔。
|
N10 G90 G17 G54 S400 M03 |
参数定义 |
|
N20 G00 X20 Y20 |
移动至镗孔位置 |
|
N30 G94 F200 |
给定进给量 |
|
N40 CYCLE86(10,0,3,-20, 20,1,3,-1,0,1,0) |
循环调用 |
|
N50 G00 Z50 |
返回安全位置 |
|
N60 M02 |
程序结束 |
